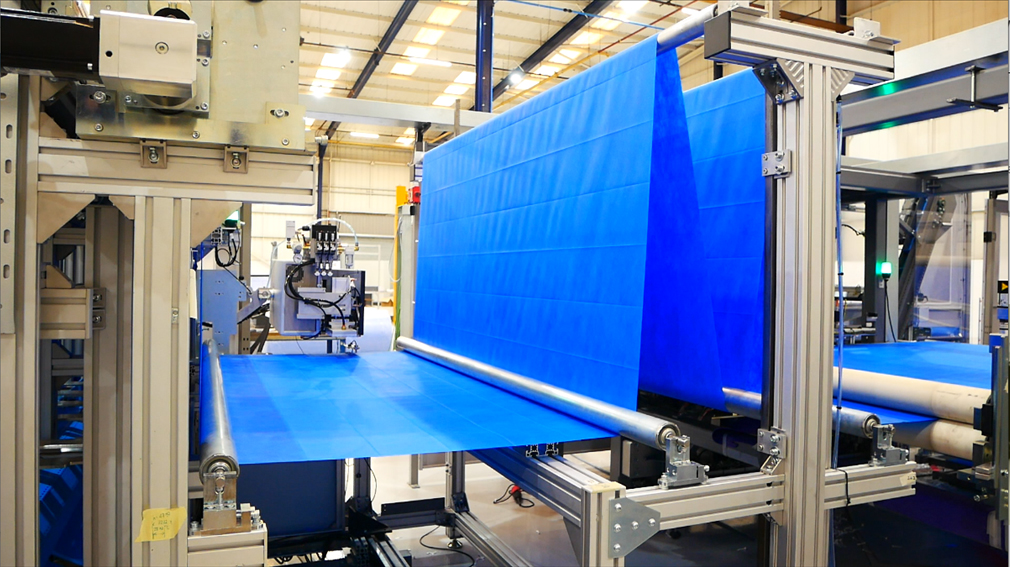
Process of the automated system
- Material is de-reeled, fed through tensioners to a pleating machine
- The pleating machine uses hot knives to add pleats into the material
- Post pleating, driven rollers drive the material to a vertically guided dancing arm to maintain tension
- Steering mechanism aligns the curtain prior to hooking
- Hooks are fed onto an infeed conveyor belt via vibratory bowl feeders.
- Vision system detects hook location, orientation and translates those coordinates to delta robots
- Delta robots track the infeed conveyor and the system software delegates pick positions to each robot
- Robots pick hooks and place them into tooling mounted on rotary tables.
- Rotary table indexes underneath the curtain and hooks are welded using an ultrasonic welding station.
- Each rotary table tracks a registration mark on each pleat and adjusts to ensure central hook position
- Post hook welding, a dancing arm buffers the curtain prior to cutting
- A label is printed and applied to the front and rear of the curtain
- The curtain is clamped and cut to length and collated into stacks
- A 6 axis robot picks a clip and inserts it into the stack, clipping it together
- Completed curtains are fed out onto an indexing conveyor for packaging
Learn More
Integrated systems
- Yaskawa GP8 Robot
- 2x Schneider 3-4 Axis Delta Robots
- Cognex Vision System
- Schneider PLC and HMIs
- 2 x Hook Bowl Feeders
- Clip Bowl Feeder
- Post Pleating Dancing Arm
- 4 x Variant DH0002 Rotary Table
- 4 x 600w ultrasonic weld heads
- SAP/ERP/SCADA PC integration
- Machine frame construction
- Fully guarded and safety interlocked
In Partnership With

Med-5

Med-3
Med-2

Med-1