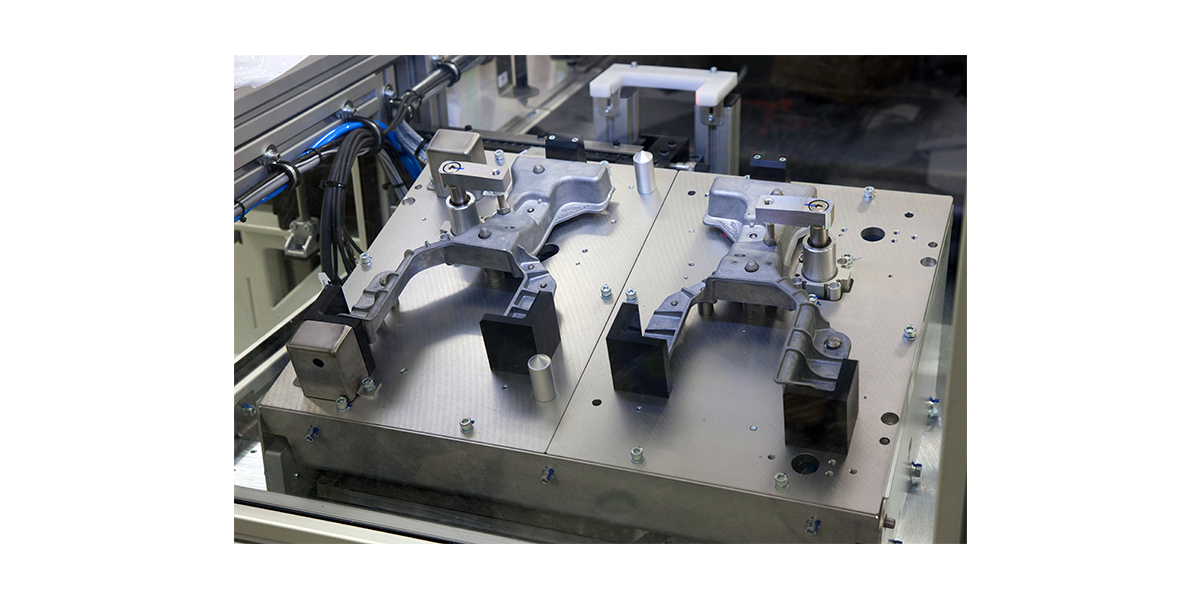
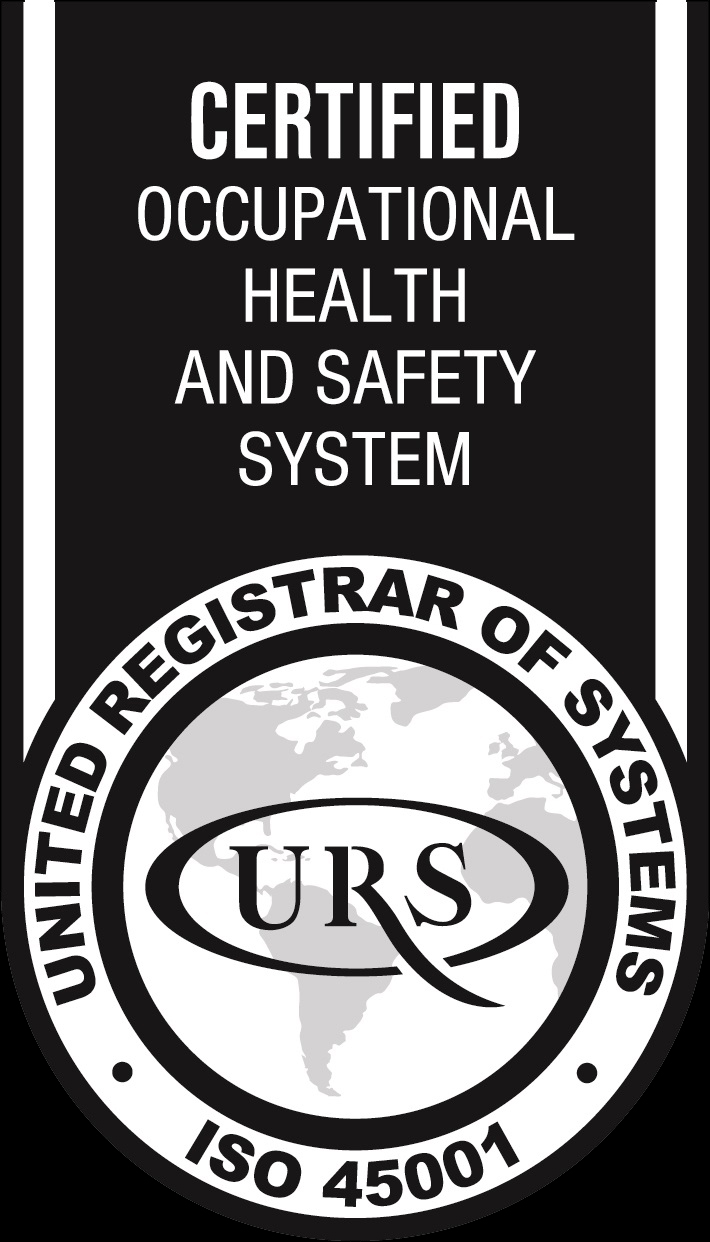
Directech QM-Systems were tasked with creating a special purpose assembly cell capable of assembling and separating a dual hand FEC bracket. This included the insertion of 3 x M6 Rivnuts into the FEC bracket. The system inserted and confirmed correct insertion using a variety of sensor technologies.
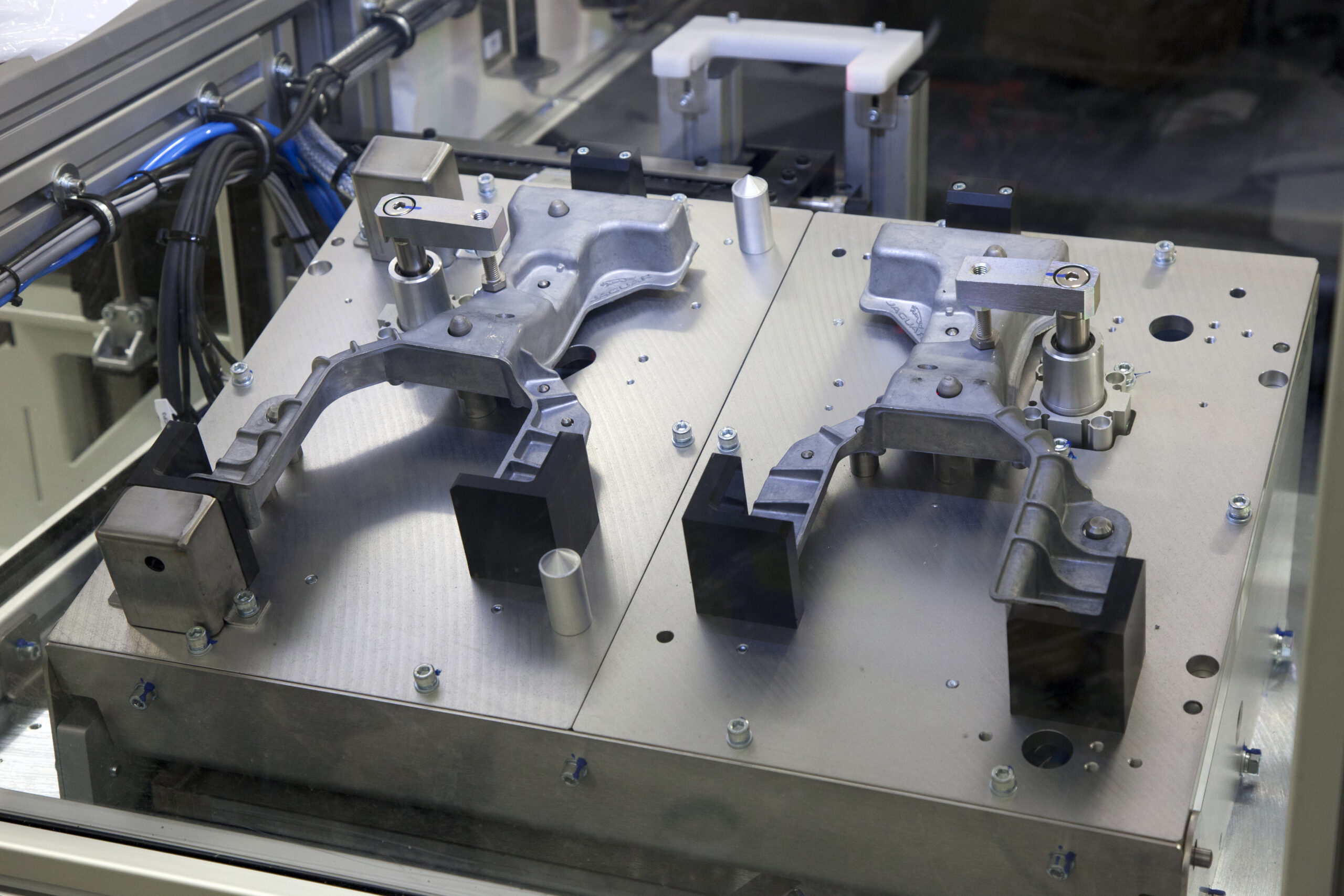
Our product utilised a FANUC Europe LRMate 200iD/7L robot to auto assemble the Rivnuts and to pick the finished good castings from the fixture and present to the out feed indexing conveyor system located at the rear of the machine. An Alphamation Ltd bowl feeder with bespoke escapement provides the load of the Rivnuts to the collection escapement ready for the robot collection. The dual end effector uses the mandrel to automatically locate on the rivnuts threads to collect. The second end effector uses a combined vacuum arrangement to collect both left and right-hand parts accordingly.
Finished components are auto unloaded to the rear of the machine onto a short section of roller conveyor. Once 4 parts are accumulated in either lane, a Balluff Inc. inductive sensor will relay a message to the operator to unload the machine. If the machine is not unloaded the machine cycle will be stop until the unload conveyors are emptied. There is segregation between left-hand and right-hand finished castings to ensure the operator does not mix the variants during unloading and packing into the finished part’s stillages.
The machine is overseen with a Siemens PLC & HMI control system capable of 70 parts per hour.









{kind=link}
{kind=link}
{kind=link}