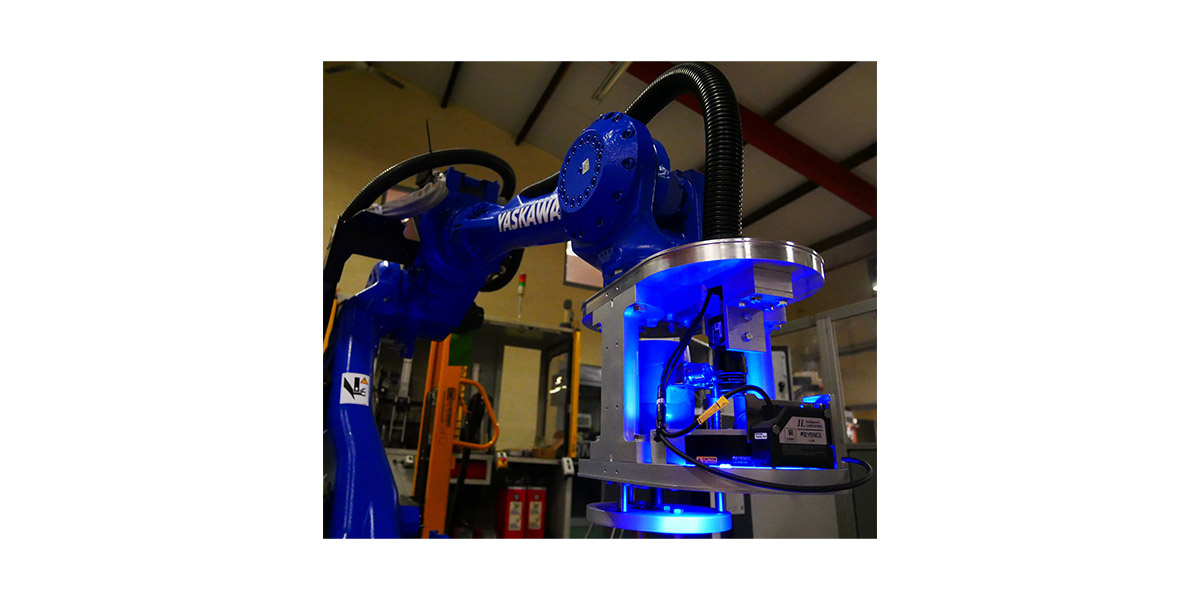
We are nearing completion of a Yaskawa robot project, utilising Keyence vision systems and a Wittenstein servo motor, this system will be capable of identifying and torquing components within a stillage.
Not only does it identify component presence, but the vision system gives us the ability to identify depth on a Z-axis and 2 PCD locations within the component, enabling us to engage pins, counter-hold and torque it.
This system combines all of these market-leading products into a full guarded cell and controlled by Siemens architecture and driven by remote HMI.